智慧交通號誌控制
自適應控制紅綠燈時序,緩解車流壅塞。
複雜/混合車流路口管理
包含汽車、機車、自行車與行人等多元參與者之動態交通調度。
幹道協調控制(Arterial Coordination)
強化主幹道路與支道之車流連貫性,減少車輛停等次數。
無需中心主控系統
可單點部署於路口,獨立運作,不依賴中央伺服器或網路穩定性。
自研邊緣運算 AI 車流影像辨識模型
此模型基於義隆電子與合作學術單位過往發表的 AI 模型 CSPNET、YOLOv4、YOLOv7和YOLOv9 的框架,在邊緣端有限算力下,發展出多任務偵測 GElanNet ,可達到每秒20幀以上的處理速度。
強化學習(Reinforcement Learning, RL)引擎
採用 RL 模型預測混合車流,非僅依賴傳統定時或感測器驅動方式。
非週期性號誌控制架構
根據即時交通變化動態調整燈號,非固定循環,提高十字路口通行效率。
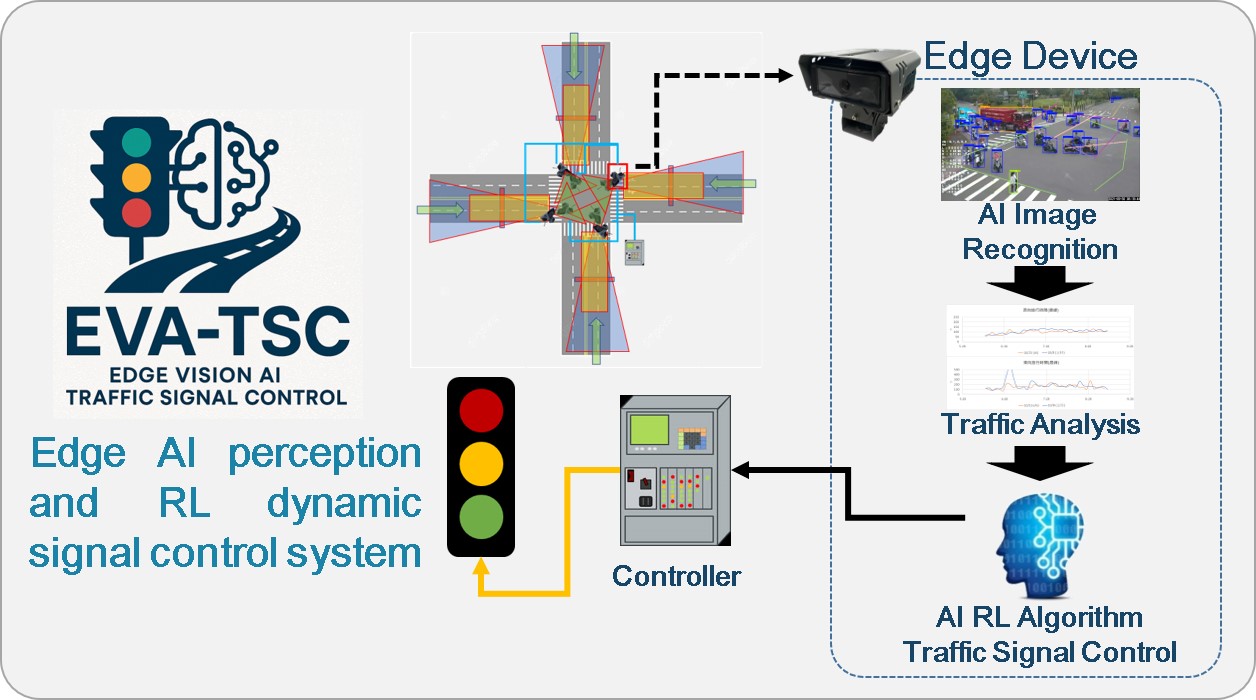
邊緣運算(Edge SoC)搭配 AI 交通攝影機
Edge AI 與交通攝影機深度整合,所有 AI 運算皆於邊緣設備執行,能毫秒級回應混合車流變化,無需依賴雲端,確保即時性與穩定性。
低延遲與高安全性
減少網路傳輸延遲與資安風險,提升實際部署的可靠性。